Arduino Note
Arduino 智能小车
Arduino 智能小车————调速篇
PWM
脉宽调制(PWM)基本原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。
通俗一点讲那,就是当如果我们想输出5V电压时,只需一直输出高电平即可;当我们想输出3.75V电压时,那我们就需要在一个周期内(一个高电平和一个低电平为一个周期)3.75÷5=75%时间输出高电平,25%时间输出低电平;同理,如果想输出2.5V电压时,我们需要在一个周期内50%时间输出高电平,50%时间输出低电平。
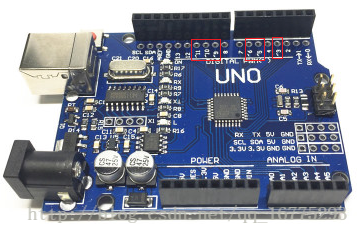
Arduino UNO开发板上只有带有“~”表示的引脚才具有PWM功能,因此我们在控制驱动时可以使用这几个引脚。
驱动模块接线
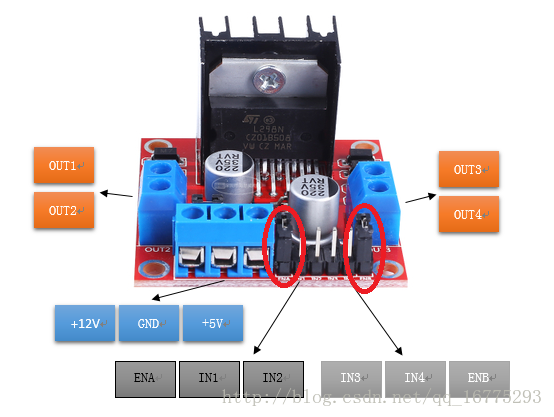
在前面的教程中已经讲过如果想控制驱动的输出时,需要对驱动的“ENA”“ENB”进行控制,因此我们需要将图中被选中部分的两个跳线帽拔掉。并将“ENA”连接Arduino UNO开发板的“5”引脚,“ENB”连接“6”引脚。
代码测试
int leftCounter=0, rightCounter=0; unsigned long time = 0, old_time = 0; // 时间标记 unsigned long time1 = 0; // 时间标记 float lv,rv;//左、右轮速度 #define STOP 0 #define FORWARD 1 #define BACKWARD 2 #define TURNLEFT 3 #define TURNRIGHT 4 #define CHANGESPEED 5 int leftMotor1 = 16; int leftMotor2 = 17; int rightMotor1 = 18; int rightMotor2 = 19; bool speedLevel=0; int leftPWM = 5; int rightPWM = 6; void setup() { // put your setup code here, to run once: Serial.begin(9600); attachInterrupt(0,RightCount_CallBack, FALLING); attachInterrupt(1,LeftCount_CallBack, FALLING); pinMode(leftMotor1, OUTPUT); pinMode(leftMotor2, OUTPUT); pinMode(rightMotor1, OUTPUT); pinMode(rightMotor2, OUTPUT); pinMode(leftPWM, OUTPUT); pinMode(rightPWM, OUTPUT); } void loop() { // put your main code here, to run repeatedly: SpeedDetection(); if(Serial.available()>0) { char cmd = Serial.read(); Serial.print(cmd); motorRun(cmd); if(speedLevel) //根据不通的档位输出不同速度 { analogWrite(leftPWM, 120); analogWrite(rightPWM, 120); } else { analogWrite(leftPWM, 250); analogWrite(rightPWM, 250); } } } /* * *速度计算 */ bool SpeedDetection() { time = millis();//以毫秒为单位,计算当前时间 if(abs(time - old_time) >= 1000) // 如果计时时间已达1秒 { detachInterrupt(0); // 关闭外部中断0 detachInterrupt(1); // 关闭外部中断1 //把每一秒钟编码器码盘计得的脉冲数,换算为当前转速值 //转速单位是每分钟多少转,即r/min。这个编码器码盘为20个空洞。 Serial.print("left:"); lv =(float)leftCounter*60/20;//小车车轮电机转速 rv =(float)rightCounter*60/20;//小车车轮电机转速 Serial.print("left:"); Serial.print(lv);//向上位计算机上传左车轮电机当前转速的高、低字节 Serial.print(" right:"); Serial.println(rv);//向上位计算机上传左车轮电机当前转速的高、低字节 //恢复到编码器测速的初始状态 leftCounter = 0; //把脉冲计数值清零,以便计算下一秒的脉冲计数 rightCounter = 0; old_time= millis(); // 记录每秒测速时的时间节点 attachInterrupt(0, RightCount_CallBack,FALLING); // 重新开放外部中断0 attachInterrupt(1, LeftCount_CallBack,FALLING); // 重新开放外部中断0 return 1; } else return 0; } /* * *右轮编码器中断服务函数 */ void RightCount_CallBack() { rightCounter++; } /* * *左轮编码器中断服务函数 */ void LeftCount_CallBack() { leftCounter++; } /* * *小车运动控制函数 */ void motorRun(int cmd) { switch(cmd){ case FORWARD: Serial.println("FORWARD"); //输出状态 digitalWrite(leftMotor1, HIGH); digitalWrite(leftMotor2, LOW); digitalWrite(rightMotor1, HIGH); digitalWrite(rightMotor2, LOW); break; case BACKWARD: Serial.println("BACKWARD"); //输出状态 digitalWrite(leftMotor1, LOW); digitalWrite(leftMotor2, HIGH); digitalWrite(rightMotor1, LOW); digitalWrite(rightMotor2, HIGH); break; case TURNLEFT: Serial.println("TURN LEFT"); //输出状态 digitalWrite(leftMotor1, HIGH); digitalWrite(leftMotor2, LOW); digitalWrite(rightMotor1, LOW); digitalWrite(rightMotor2, HIGH); break; case TURNRIGHT: Serial.println("TURN RIGHT"); //输出状态 digitalWrite(leftMotor1, LOW); digitalWrite(leftMotor2, HIGH); digitalWrite(rightMotor1, HIGH); digitalWrite(rightMotor2, LOW); break; case CHANGESPEED: Serial.println("CHANGE SPEED"); //输出状态 if(speedLevel) //接收到换挡命令的时候切换档位 speedLevel=0; else speedLevel=1; break; default: Serial.println("STOP"); //输出状态 digitalWrite(leftMotor1, LOW); digitalWrite(leftMotor2, LOW); digitalWrite(rightMotor1, LOW); digitalWrite(rightMotor2, LOW); } }
由于之前设计不太合理,占用了太多的PWM引脚,因此在代码里对控制小车电机的引脚做了点小改动,如下所示
int leftMotor1 = 5; int leftMotor2 = 6; int rightMotor1 = 7; int rightMotor2 = 8;
现在改为
int leftMotor1 = 16; int leftMotor2 = 17; int rightMotor1 = 18; int rightMotor2 = 19;
在前面的宏定义中加入换挡的定义#define CHANGESPEED 5
#define STOP 0 #define FORWARD 1 #define BACKWARD 2 #define TURNLEFT 3 #define TURNRIGHT 4 #define CHANGESPEED 5
Arduion的PWM引脚需要和正常引脚一样,在void setup()函数中初始化为输出模式
pinMode(leftPWM, OUTPUT); pinMode(rightPWM, OUTPUT);
在小车的控制状态函数void motorRun(int cmd)中添加多一个选择项,用来切换速度。
case CHANGESPEED:
Serial.println("CHANGE SPEED"); //输出状态
if(speedLevel) //接收到换挡命令的时候切换档位
speedLevel=0;
else
speedLevel=1;
break;
在主函数void loop()中添加PWM输出的函数,analogWrite(pin, value)函数中“pin”代表使用的引脚,“value”代表输出PWM值的大小,范围是0~255。
if(speedLevel) //根据不通的档位输出不同速度
{
analogWrite(leftPWM, 120);
analogWrite(rightPWM, 120);
}
else
{
analogWrite(leftPWM, 250);
analogWrite(rightPWM, 250);
}